╠ž╦╣└Ł╚╦ą╬ÖCŲ„╚╦Ī░Ūµ╠ņų∙Ī▒ė┌ 2022 ─Ļ 9 į┬Ąū┴┴ŽÓĪŻ2021 ─Ļ 8 į┬Ż¼±R╦╣┐╦į┌╠ž╦╣└Ł ─ĻČ╚ AI ķ_Ę┼╚š╔Ž┤╬╣½ķ_š╣╩Š┴╦Ī░Ūµ╠ņų∙Ī▒Ą─ŽļĘ©ĪŻāH▀^ę╗─ĻĢrķgŻ¼Ī░Ūµ╠ņų∙Ī▒įŁą═ÖCė┌ 9 į┬ 30 ╚š╠ž╦╣└Ł AI Day ░l▓╝Ż¼ė▓╝■ĘĮ├µŻ¼Ī░Ūµ╠ņų∙Ī▒╔ĒG 172CMŻ¼š¹¾wųž┴┐ 73KGŻ╗ąąū▀╣”┬╩ 500WŻ¼ū°Ž┬╣”┬╩ 100WŻ¼š¹¾wģóöĄ┼c 2021 ─ĻĖ┼─ŅÖC┬įėą│÷╚ļĪŻ
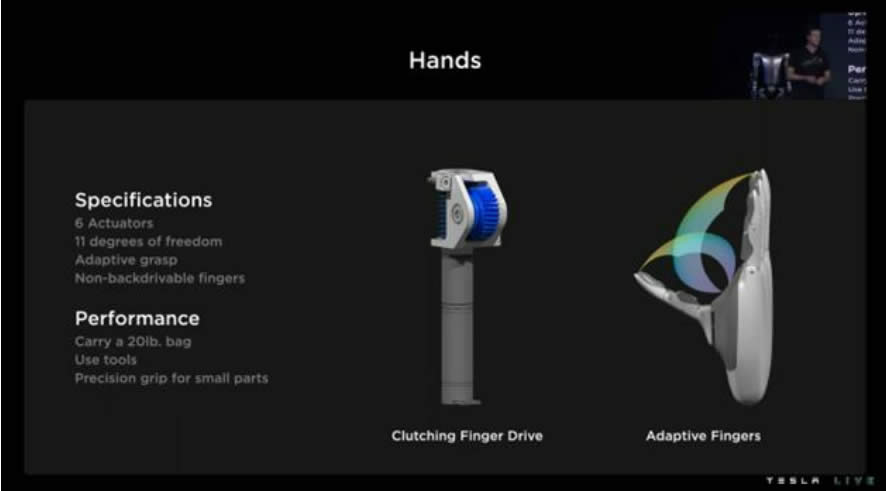
Ī░Ūµ╠ņų∙Ī▒╚½╔Ē╝s 50 éĆūįė╔Č╚Ż¼╩ųųĖņ`├¶Č╚GŻ¼─▄ē“ØMūŃČÓĘNęÄĖ±Ą─╬’¾wūź╚ĪąĶŪ¾ĪŻÖCŲ„╚╦å╬╩ųŠ▀ėą 6 éĆł╠ąąŲ„Ż¼11 éĆūįė╔Č╚Ż¼į┌ī”╔·─┤ųĖ┼cĮī┘╝ĪļņĄ─┼õ║Ž Ž┬Ż¼Ī░Ūµ╠ņų∙Ī▒─▄ē“═Ļ│╔ī”▓╗═¼ųž┴┐║═┤¾ąĪĄ─╬’╝■Ą─ūź╬šĪŻ═¼ĢrŻ¼╠ž╦╣└ŁÖCąĄ╩ų┤Ņ▌d─▄ē““ī äė╩ųųĖĖąų¬╬’¾wĄ─é„ĖąŲ„Ż¼Ä═ų·ŲõūRäeąĶę¬ūź╬šĄ─╬’¾wŻ¼▓óį┌▓╗öÓĄ─ūź╬š▀^│╠ųąīW┴Ģ╠ßG ÖCąĄ╩ų▀mæ¬ąįĪŻ
╠ž╦╣└Ł▓╔ė├┼c Autopilot ŽÓ═¼Ą─ ╦ŃĘ©┐“╝▄Ż¼═©▀^ūįäėś╦ūóŻ©Auto LabelingŻ®ĪóĘ┬šµ(Simulation)║═öĄō■ę²ŪµŻ©Data EngineŻ®ą╬ │╔ė¢ŠÜöĄō■ė├ęįė¢ŠÜĪ░Ūµ╠ņų∙Ī▒Ą─╔±ĮøŠWĮjŻ¼╩╣╠ž╦╣└Ł╚╦ą╬ÖCŲ„╚╦─▄ē“ū÷ĄĮōpé¹┐žųŲĪóĖąų¬ ų▄ć·ŁhŠ│Īóūįų„ęÄäØąąäė┬ĘÅĮĪóų▒┴óąąū▀▓ó▒Ż│ųŽÓī”ŲĮ║ŌĄ╚╣”─▄ĪŻ
Ī░Ūµ╠ņų∙Ī▒▓╔ė├ųŪ─▄±{±éözŽ±Ņ^Ż©¶~č█ÅVĮŪ+ū¾ėęözŽ±Ņ^Ż®┼c Autopilot ╦ŃĘ©Ż¼ā╚ų├ FSD ąŠŲ¼Ż¼─▄ē“ūRäeų▄ ć·╬’└ĒŁhŠ│Ą─GŅl╠žš„▓ó▀Mąą┴ó¾wõų╚ŠŻ¼śŗĮ©┴╦ÖCŲ„╚╦┴╝║├Ą─┐šķgĖąų¬─▄┴”ĪŻ
Ī░Ūµ╠ņų∙Ī▒Ą─┤¾─X╬╗ė┌▄|Ė╔Ż¼┤Ņ▌d╠ž╦╣└Łūį蹥─ DOJO │¼Jėŗ╦ŃÖCŻ¼Ųõ╗∙▒Šå╬į¬╩Ū D1 ąŠŲ¼Ż©╣▓ėŗ 1500 éĆŻ®ĪŻD1 ąŠŲ¼å╬¾w▓╔ė├Ęų▓╝╩ĮĮYśŗ║═ 7 ╝{├ū╣ż╦ćŻ¼Š▀ėą╦Ń┴”║═ĦīÆŻ¼ ŽÓÓÅąŠŲ¼ķg═©▀^ūįäōGīÆĦĪóĄ═čė▀tĄ─▀BĮėŲ„▀BĮėŻ¼ą┬ Dojo ExaPOD ė╔ČÓ Dojo ÖC╣±ĮM │╔Ż¼ā╚║¼ 3000 éĆ D1 ąŠŲ¼Ż¼ōĒėą 1.3TB Ą─G╦┘ SRAMĪó13TB Ą─GĦīÆ DRAMŻ¼╦Ń┴”G▀_ 1.1 EFLOPĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |